
[ 딥러닝 ] Convolutional Neural Networks
Updated:
Convolutional Neural Networks의 특징
- feed-forward network
- convolution
- pooling
- non-linearity
- supervised learning
- training convolutional filters by back-propagating error
Convolution
\[g=f*h\]$g=f*h$ where $\begin{cases} g(x,y)=\int_{-\infty}^{\infty}\int_{-\infty}^{\infty}f(x+u,y+v)h(u,v)dudv
\ \,
g(x,y)= \sum_{u,v} f(x+u,y+v)h(u,v)\end{cases}$
Convolutional Layer
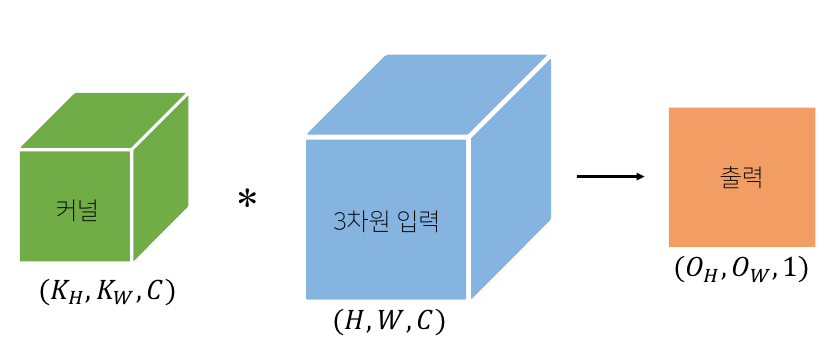
- input 크기 : $(H,W,C)$
- kernel 크기 : $(K_H, K_W, K_C)$
- output 크기 : $(O_H,O_W,O_C)$
-
stride : 기본적으로 1
- kernel을 거친 출력 size?
- stride가 1인 경우
- stride가 1보다 큰 경우
- kernel size?
-
stride가 1인 경우
\[K_H = H-O_H+1 ,\,\,\, K_W = W-O_W+1 \\ \, \\ ∴ kernel = input-output+1\] -
stride가 1보다 큰 경우
-
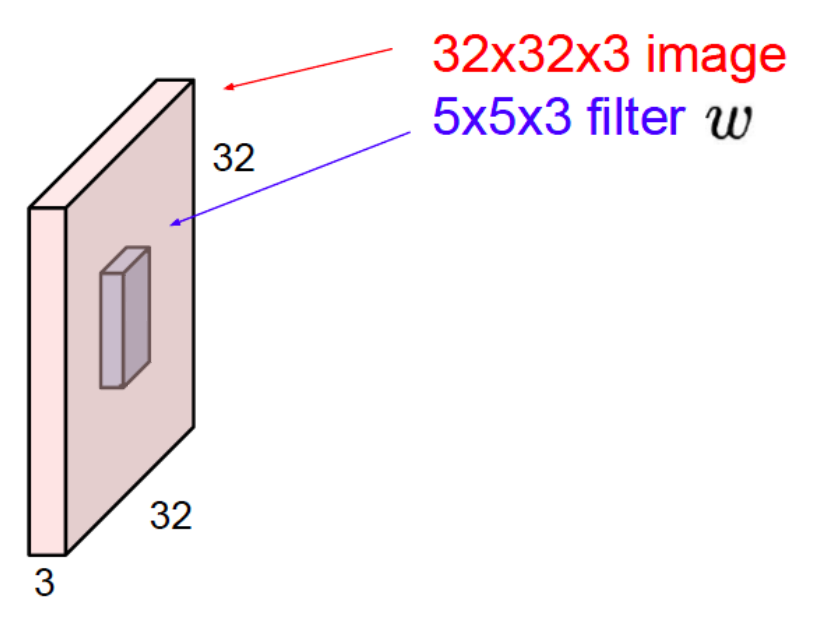
- 사실상 kernel은 각 픽셀에 weight를 곱해주는 역할이다.
- 위의 예시에선 총 75개의 parameter(=5Χ5Χ3 weights)가 존재하는 상황이다.
-
채널이 여러 개인 경우 2D Convolution을 채널 수만큼 적용하는 것이다.
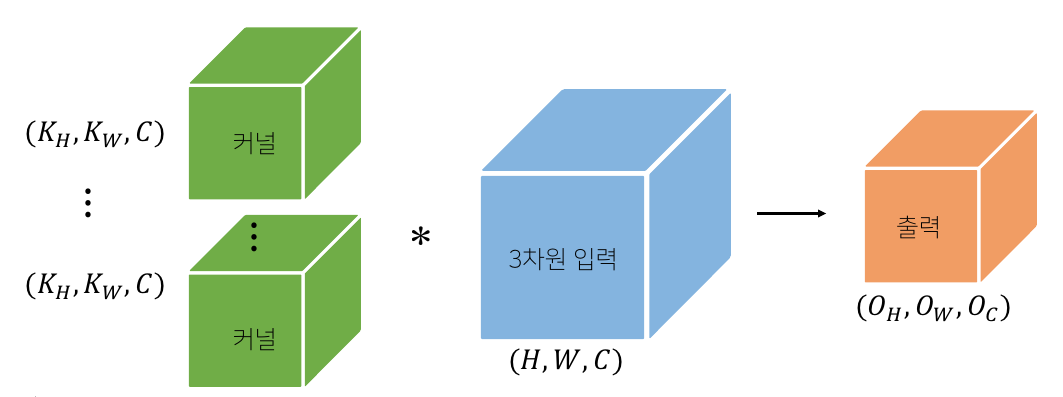
-
kernel을 $O_C$개 만큼 적용하면 출력의 channel도 $O_C$이다.
-
-
ConvNet은 convolutional layer들의 모임이다.
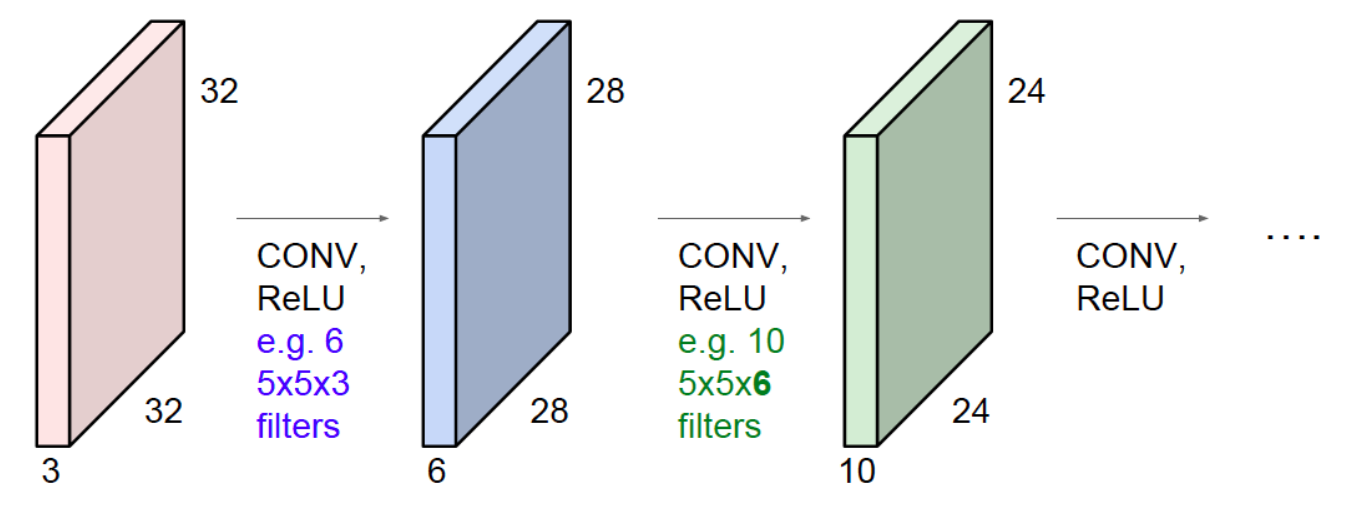
- 매번 convolution한 결과를 activation function (여기서는 ReLU)에 넣는다.
- activation function 없으면 linear transformation한 것과 다를 게 없다.
stride
- downsampling 역할
- 위의 상황에서 stride 3이라면 output의 size?
- $\frac{32-5}{3}+1=10$이므로 $output:(10,10,1)$
padding
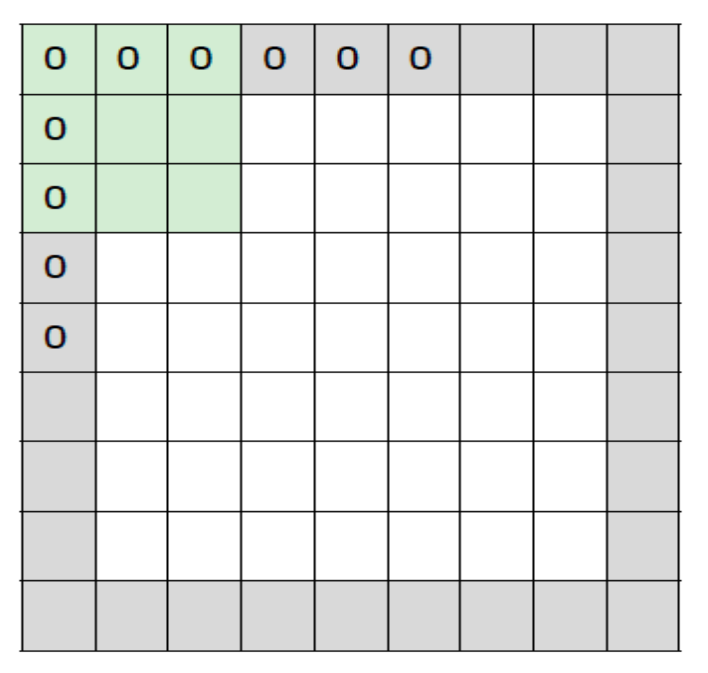
- input size와 동일하게 output이 나올 수 있도록 0으로 테두리를 채우는 것
- kernel size가 $(F,F)$라 하면, $(F-1)/2$ 만큼의 zero-padding을 하면 된다.
- $kernel=(3,3)$이면 $pad=1$ (예시의 그림)
- $kernel=(5,5)$이면 $pad=2$
Pooling Layer
- feature map의 size를 줄이는 역할을 한다.
max pooling
- kernel 내에 들어오는 픽셀 값 중 최대값을 선택한다.
average pooling
- kernel 내에 들어오는 픽셀 값의 평균을 취한다.
Fully-Connected Layer
- each is connected to an entire region in the input
- no parameter sharing
MLP와 CNN의 차이점
- parameter 수가 감소했다.
- weight sharing